

View on GitHub
Open this notebook in GitHub to run it yourself
- This tutorial proposes a novel quantum computing approach to solving the inverse kinematics problem of a robotic arm [1].
- The algorithm is based on variational optimization methods similar to the Variational Quantum Eigensolver (VQE) and the Quantum Approximate Optimization Algorithm (QAOA).
- The proposed quantum circuit ansatz represents each robotic link using one qubit.
Ansatz circuit without entanglement
Output:
Post Processing
Output:
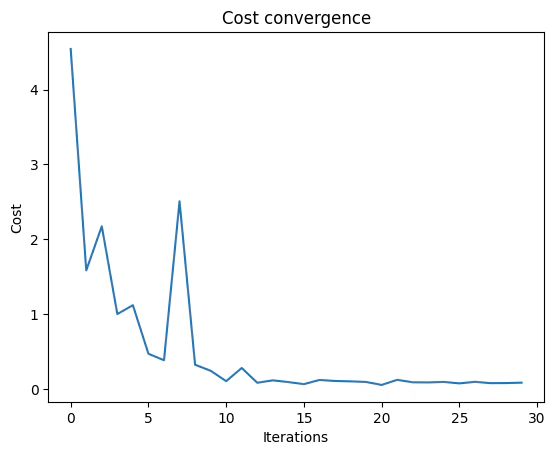
Create cost function
Target positionPauli based measurment
Output:
Output:
Output:
Define the function for extracting the predicted position from the quantum algorithm results
Output:
Output: